IMU-6050 6-Axis Sensor Interphase with Arduino
HELLO WORLD,
This is the project of IMU-6050 interphase with Arduino UNO for measuring 6-axis (acceleration, gyro) i.e, 6 degrees of freedom with Temperature sensor.
OVERVIEW,
IMU-6050, is an 6-axis sensor having 3-axis accelerometer and 3-axis gyroscope with tempertaure sensor embedded.
It looks so,
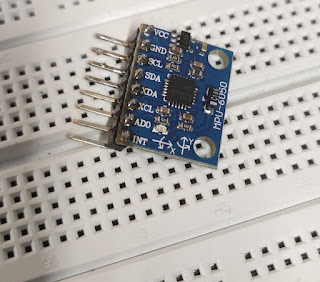
It is an 8-pin sensor with accelerometer, gyro and temperature sensor.
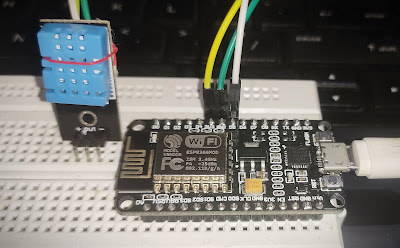
CIRCUIT / WORKING,
Connect the circuit as shown below.........,
The pinout is shown below.

CODE,
Execute the following code on Arduino IDE.
The output can be easily dragged at serial monitor if arduino IDE.
That data can be exported to LCD or some real world funcions or even VPyhon 3-axis representaion of sate of body .
The data looks something like this.

GALLERY ;;;;;




HAPPY TIME!!!
Any queries, drop here on comments.................
This is the project of IMU-6050 interphase with Arduino UNO for measuring 6-axis (acceleration, gyro) i.e, 6 degrees of freedom with Temperature sensor.
OVERVIEW,
IMU-6050, is an 6-axis sensor having 3-axis accelerometer and 3-axis gyroscope with tempertaure sensor embedded.
It looks so,

It is an 8-pin sensor with accelerometer, gyro and temperature sensor.
CIRCUIT / WORKING,
Connect the circuit as shown below.........,
The pinout is shown below.

CODE,
Execute the following code on Arduino IDE.
#include "Wire.h"
const int MPU_ADDR = 0x68;
int16_t accelerometer_x, accelerometer_y, accelerometer_z;
int16_t gyro_x, gyro_y, gyro_z;
int16_t temperature;
char tmp_str[7];
char* convert_int16_to_str(int16_t i)
{
sprintf(tmp_str, "%6d", i);
return tmp_str;
}
void setup() {
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
}
void loop() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU_ADDR, 7*2, true);
accelerometer_x = Wire.read()<<8 | Wire.read();
accelerometer_y = Wire.read()<<8 | Wire.read();
accelerometer_z = Wire.read()<<8 | Wire.read();
temperature = Wire.read()<<8 | Wire.read();
gyro_x = Wire.read()<<8 | Wire.read();
gyro_y = Wire.read()<<8 | Wire.read();
gyro_z = Wire.read()<<8 | Wire.read();
Serial.print("aX = "); Serial.print(convert_int16_to_str(accelerometer_x/16384.0));
Serial.print(" | aY = "); Serial.print(convert_int16_to_str(accelerometer_y/16384.0));
Serial.print(" | aZ = "); Serial.print(convert_int16_to_str(accelerometer_z/16384.0));
Serial.print(" | tmp = "); Serial.print(temperature/340.00+36.53);
Serial.print(" | gX = "); Serial.print(convert_int16_to_str(gyro_x/131.0));
Serial.print(" | gY = "); Serial.print(convert_int16_to_str(gyro_y/131.0));
Serial.print(" | gZ = "); Serial.print(convert_int16_to_str(gyro_z/131.0));
Serial.println();
delay(1000);
}
OUTPUT
The output can be easily dragged at serial monitor if arduino IDE.
That data can be exported to LCD or some real world funcions or even VPyhon 3-axis representaion of sate of body .
The data looks something like this.

GALLERY ;;;;;




HAPPY TIME!!!
Any queries, drop here on comments.................


Comments
Post a Comment